段ボール受動歩行機のつくりかた
(自由研究にいいかもね)
「受動歩行ロボットのすすめ」用の各種ファイルは「書籍の補完ファイル一覧」を参照してください.
1.用意するもの
・ステンレス棒 直径3mm,長さ20cm(無ければ竹籤などでもOKですが,両端に洗濯ばさみをつけるなどしておもさを調整してください)
・輪ゴム4本
・プラスチック段ボール
(ホームセンターなどで売ってる厚さ4mmのものを使っています.強度に問題がありますが紙の段ボールでも代用できます.)
・ストロー,直径4mm(内径3.5mm,細めのもの)
・工具:はさみ,カッターナイフ,カッティングマットなど.
・両面テープもしくは接着剤.
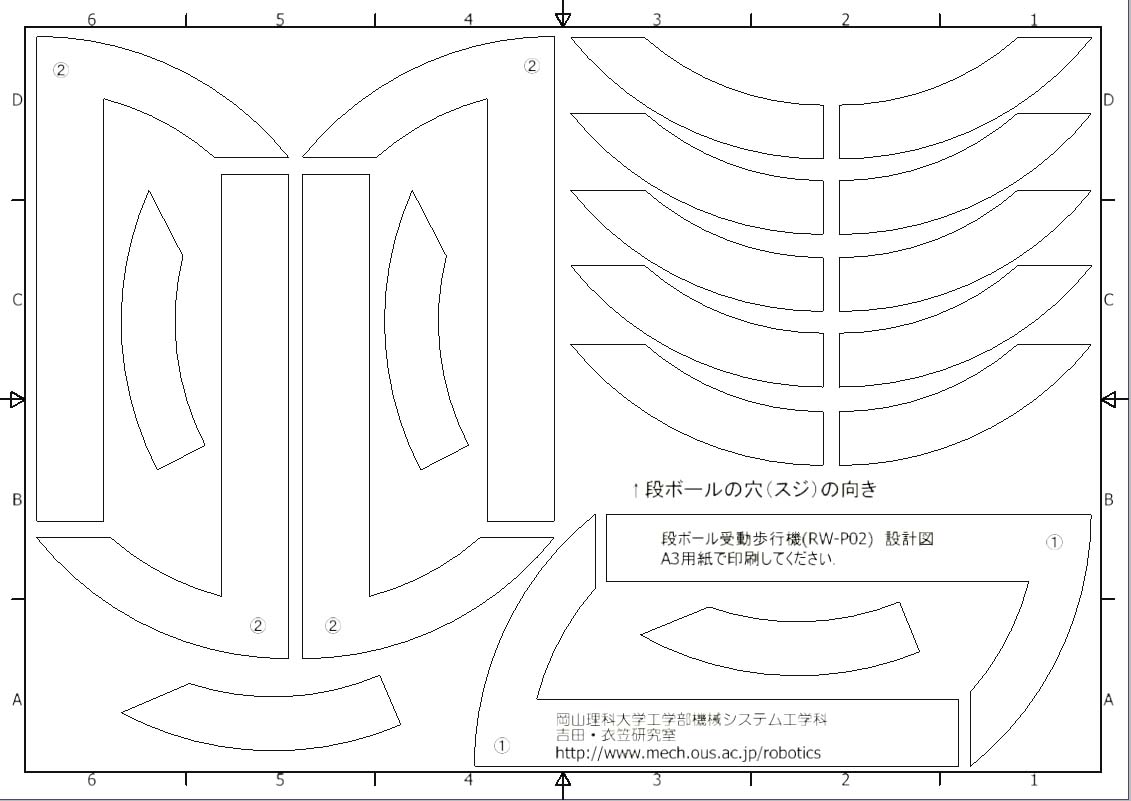
・設計図(リンクにあるファイルをA3用紙に印刷してください.)
2.つくりかた
ステップ1)部品の切り出し
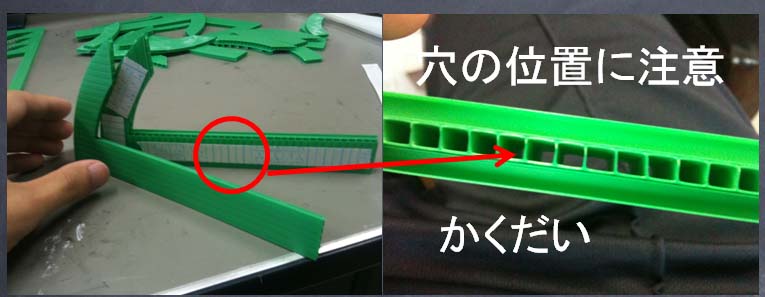
まず,設計図をA3用紙に拡大して印刷し,段ボールに貼り付けます.段ボールの穴(スジ)の向きに注意してください.貼り付けた設計図の線に合わせて部品を全て切り出してください.
注意:円弧状になっている部分は足の裏になります.この形がきれいに切り出せていないと立つことさえできません.ていねいに正確に切りましょう.
ステップ2)脚の作成
切り離した部品����を2枚の部品����で挟み込むように貼り合わせて脚を作ります.貼り合わせはのりでも両面テープでもしっかり貼り付けられるものならなんでもかまいません.
ステップ3)足の貼り付け
図のように,足をステップ2でつくった脚に貼り付けてください. 両側に3〜4枚ずつ貼ると安定します.枚数はお好みで.
注意:足の裏は,歩行にとても影響するのできれいにそろえて貼り合わせてください.

ステップ4)腰の棒を通すストローをつける
下の図のように,腰の棒を通す場所にストローをはめ込みましょう.両脚の場所は同じにしないと...ストローは脚の幅より少し長いぐらいに切ってください.
注意:はめ込む場所はどこでもかまいません.この場所を調整することで歩き方が変わります.うまく歩くところを自分で見つけましょう!

脚にストローをはめ込んだところ.
ステップ5)腰の棒を通して輪ゴムで脚を固定する
ステンレス棒の真ん中に輪ゴムを1本巻き付けます.それをステップ4でつけたストローに通して両端も輪ゴムで固定します.
注意:輪ゴムがストローに付いていると脚がなめらかに回転しません.ほんの少しストローから離してつけるのがコツです.

完成!
追記:その後のちょっとした工夫
このままでも歩くのですが,ちょっとした工夫を加えると比較的簡単に歩きます.
【滑り止めをはる】
足の裏はプラスチック段ボールがむき出しで凸凹しているだけではなく,かなり滑りやすい. この滑りをなくすために,絨毯の滑り止めなどを図のように足底に貼る.


【前に倒れないように】
このとき足の手前側に1cm程度滑り止めをはみ出させることと,後側は1cm程度貼らない部分を作っておく.
1.前にはみ出した滑り止めは歩行機が前方に転ぼうとするのを防ぐ効果がある.
2.下の側面図(横から見た図)を見ると,歩行機が若干後ろに傾いていることがわかる. この傾きは足底の後側に滑り止めが貼っていない部分があることが原因. この傾きがあるため,斜面においたとき前方へ転倒しにくくなる.

横から見るとほんの少し後ろに傾いているのがわかるかな?
3.歩行実験!
堅い板(木など手では曲がらないぐらいのもの)を使って坂道をつくりましょう.その上で左右にロボットを揺らしながら離してみてください.うまくできていたら下の映像のように10歩程度歩いてくれます.
歩かないときは:
ストローをはめた位置をいろいろかえてみましょう.
足の裏はきれいな円弧になっていますか?
足の裏に,カーペットの滑り止めなど柔らかいものを貼るといいかも
みなさん,工夫してみてくださいね.
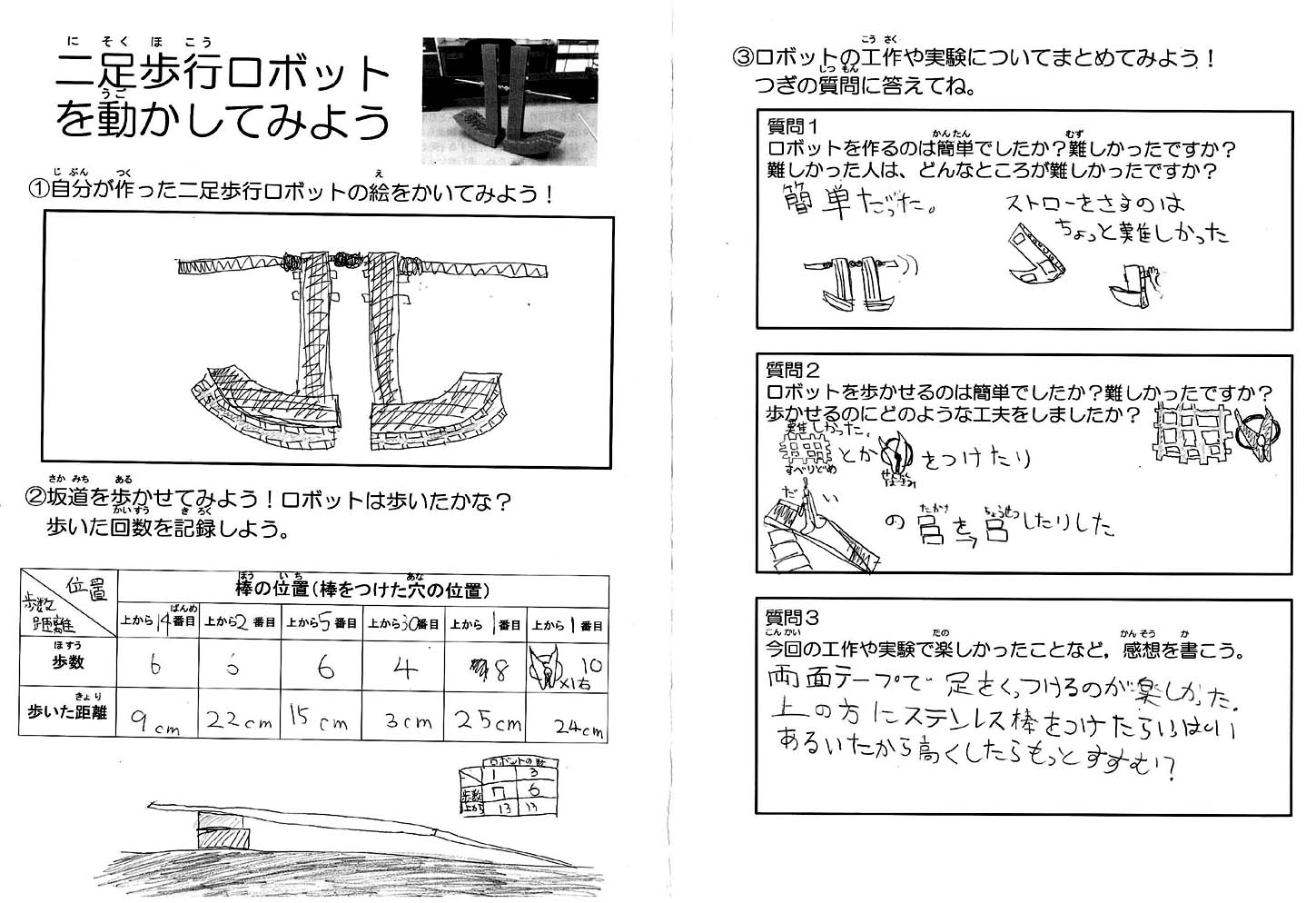
夏休みの自由研究用ノート:このファイルを印刷して自由研究ノートに使ってみてください.もちろん,オリジナルを作ってくれてもいいです.図を右クリックするとノート(未記入)がダウンロードできます.
段ボール2足歩行機Ridai Passive Walker Paper02 (RW-P02)
プラスチック段ボールの切り出しはちょっと難しいかもしれません.研究室では岡山理科大学の工作センターのレーザー加工機を使用して切り出しを行っています.基本的には岡山で小学生向けイベントに使用していますが,出前授業なんかもできますので,興味がある方は是非ご相談ください.
問い合わせ先:岡山理科大学工学部機械システム工学科
〒700-0005 岡山市北区理大町1-1,電話 086-256-8471 (工学部事務室)