HomeResearchRobotics Laboratory
Robotics Laboratory (Prof. Tetsuya Kinugasa)
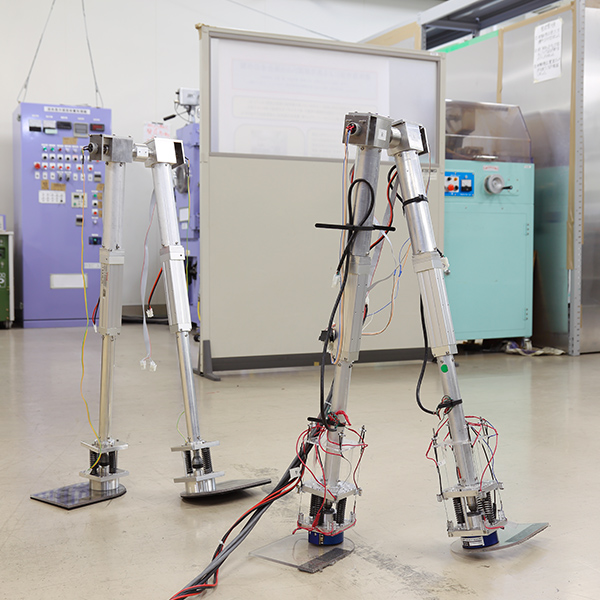
Biped locomotion, search and rescue robotics, and planetary exploration rover.
At the Robotics Laboratory, we study two main themes: biped locomotion based on passive dynamic walking and a special mobile mechanism called flexible mono-tread mobile track (FMT). We are attempting to develop a natural and energy efficient biped walker based on passive dynamic biped walking. FMT is a unique mechanism using the mono-track system that can flex in three dimensions for search and rescue operations. Recently, we began a study on terramechanics for a planetary exploration rover.
We introduced a special gamma ray camera "PEPT" to observe three-dimensional movement of sand particles, which clarifies a mechanism between sand and rover wheels.