ロボット工学研究室
二足歩行,救助支援,惑星探査などのロボット開発
- 二足歩行,救助支援,惑星探査ロボットなどの研究
-
キーワード
- 二足歩行ロボット
- レスキューロボット
- 惑星探査ロボット
- 制御
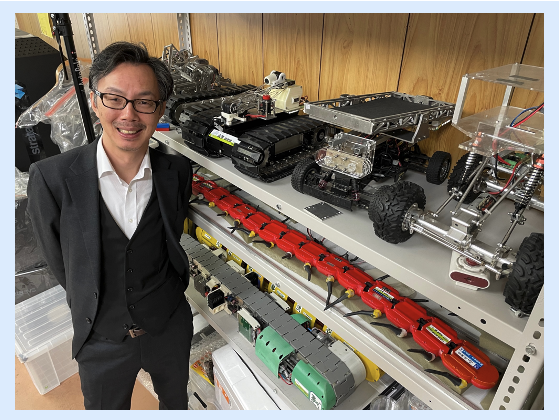
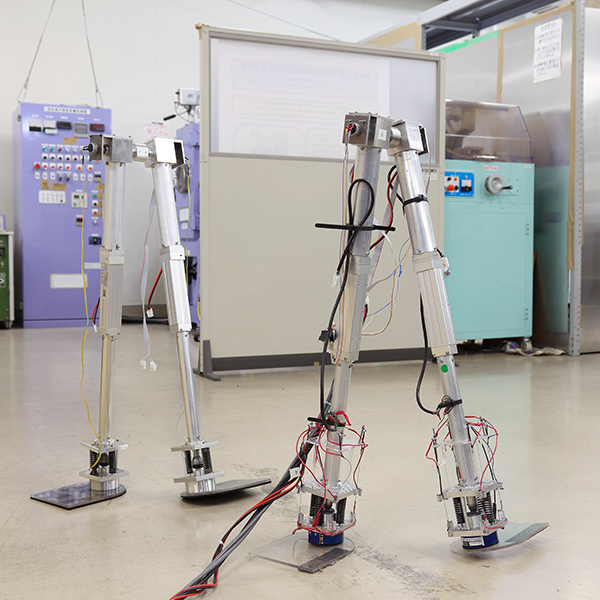
ロボット工学研究室では,主に2つのテーマについて研究を行っています. 一つは,受動歩行メカニズムにに基づく 2足歩行機, もう一つは,災害現場や惑星などの極限環境におけるユニークな移動機構 柔軟全周囲クローラ.2足歩行機は,世の中に 沢山あるんですが,より自然で効率的なものを実現することをめざしてます. 柔軟全周囲クローラについては, 今までに無かった,一本のクローラが上下左右に湾曲する移動機構です.